The next BIG thing is very SMALL——雖然也是號稱「機器人」,但奈米機器人不需模仿人類行為,設計奈米機器人的主要目的是希望它們可以為人類在「奈米尺寸的空間內」執行「不可能的任務」,例如驅動、探測、操作、推進、發送信號等工作,而奈米機器人通常只需具備單一或數個功能即可,所以可以微小到猶如病毒、細菌或細胞一樣,甚至只有某種特定的功能……
奈米機器人(nanorobots;亦稱nanobots或nanites),尺寸介於100至1000奈米之間,為被設計去執行特殊任務的奈米機械(nanomachine)。由於奈米機器人是根據分子生物學原理為設計原型,其研發也屬於「分子仿生學」( molecular bionics) 的範疇,所以奈米機器人也可稱為「分子機器人」(molecular robot)。
奈米機器人的設計與製造,與我們普遍認知的「機器人」大不相同。現今的機器人研發方向多以模仿人類的行為為主,也就是所謂的人型機器人(humanoid robot),例如Honda的ASIMO(圖一),以精密的機械結構來執行雙腳走路、單手抓取、雙手搬運等動作,並且能對周遭環境變化做出立即且適當的反應,而這些動作須要有強大的偵測感知裝置及高度協調的神經網路作後盾。
圖一、ASIMO 圖片來源:http://thefutureofthings.com/5369-the-rise-and-fall-of-asimo/
雖然也是號稱「機器人」,但奈米機器人不需模仿人類行為,設計奈米機器人的主要目的是希望它們可以為人類在「奈米尺寸的空間內」執行「不可能的任務」,例如驅動、探測、操作、推進、發送信號、訊息處理、聚集(swarm)等等工作,而奈米機器人通常只需具備上述的單一或數個功能即可,所以奈米機器人可以微小到猶如病毒、細菌或細胞一樣,而且只有某種特定的功能。 圖二為奈米機器人的想像示意圖。
圖二、奈米機器人的想像示意圖 http://robotnor.no/expertise/robotic-systems/nanorobotics/
奈米機器人的研發是起源於1990年代所盛行的微型機器人(microrobots)研究,並融合了在2000年後有重大突破的奈米科技所形成的「自然演進」發展。在此之前,就有科幻電影描繪了微小潛艇穿梭於人體內的場景,例如1966年的《聯合縮小軍》(Fantastic Voyage)及1987年的《驚異大奇航》(InnerSpace),而現今拜奈米科技之賜,這些科幻的虛擬構想將有機會得以實現(人也被奈米化的情節當然是不包括在內的)。
在1990年代,奈米機器人的研究先驅Eric K. Drexler,就已經描述了分子機械(molecular machinery)與分子製造(molecular manufacturing)的概念,另一位研究先驅Robert A. Freitas,則是致力於發展醫學奈米機器人的概念。現今,有越來越多的研究單位聚焦於奈米機器人的研發,從概念衍生出的實體研究成果發表也快速地增長,奈米機器人的研發領域也持續擴張,奈米機器人的型態也更趨完整與精密。
根據C. Mavroidis 及 A. Ferreira 的分類(詳見參考資料 1 ), 奈米機器人有以下四種 類型: (1) Nano-Manipulators,(2) Bio-Nanorobots,(3)Magnetically Guided Nanorobots,(4)Bacterial-Based Nanorobots。
奈米機械臂Nano-Manipulators
廣義的來說,「奈米機器人」一詞也可用於具有奈米尺寸精密準確度的大尺寸機械臂(large-scale manipulators)之上,也就是說,即使機械臂是龐大的機器,但只要其末端操作器(end-effector)可以完成奈米操作的任務,則此類機械臂也是屬於奈米機器人學(nanorobotics)所研究的範圍,但我們不會直接將之稱為奈米機器人,而是將這類型的機械臂稱為「奈米機械臂」(nanomanipulators)。
掃描式探針顯微鏡(scanning probe microscope;SPM)就是被視為是一種奈米機械臂,其也是啟發科學家去研發奈米機器人的動力之一。此類顯微鏡具有掃描及探測機制,其影像解析度 主要取決於探針的大小,而探針通常是在奈米 的範圍。
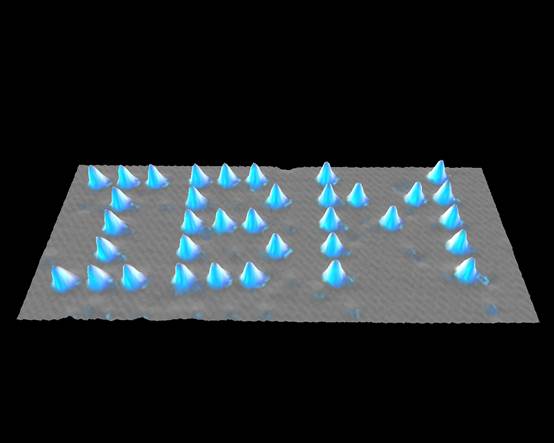
SPM又可分為「掃描式穿隧顯微鏡」(scanning tunneling microscope;STM)、「原子力顯微鏡」(atomic force microscope;AFM)、「掃描式近場光學顯微鏡」(near-field optical microscope;SNOM)等三種,其中最有名的應用案例就是在1990年時,IBM的科學家Eigler及Schweizer首次利用STM,逐步移動吸附在鎳表面上的35顆氙原子(Xenon atoms),並把它們排成「IBM」字樣(圖三),而此一原子搬移技術,算是為奈米機器人的生產製造奠定基礎。
圖三、以氙原子排成的「IBM」字樣 https://www-03.ibm.com/press/us/en/photo/28500.wss
經過10多年的改良歷程,現今可以量產製造的奈米機械臂,其結構已更加精密,操作也更加靈巧,而且也有了新的名稱:nanorobotic manipulators(NRM)。NRM通常是內建於掃描式電子顯微鏡(scanning electron microscopes;SEM)或穿透式電子顯微鏡(transmission electron microscopes;TEM)之內。圖四是DCG Systems製造的Nanoprobing System,其內有8支奈米機械臂,可以量測到14奈米製程的晶片。
圖四、包含8支奈米機械臂的Nanoprobing System http://dcgsystems.com/products/nanoprobing/nprober-ii/
生物奈米機器人Bio-Nanorobots(DNA- and Protein-Based)
生物奈米機器人,其組成元件是利用生物體的生命元素(biological elements)所建造的,也就是利用DNA與蛋白質等材料,建造出組裝奈米機器人所需的奈米機械零組件。生物奈米機器人也是分子機械(molecular machines)研究領域的項目之一。
採用DNA與蛋白質做為奈米機器人的零組件材料,其目標是希望直接將生命元素中的生物化學能轉換為機械動能,進而製造出具有運動、施力、感覺、信號傳送等等功能的奈米零組件,因此,根據此一能量轉換原理,就可以製造出奈米機器人所需的馬達、接合關節、傳輸元件,以及感測元件等等。
生物奈米機器人將用於操控奈米級物質、組裝或製造其他奈米級機械,並進行保養、修補、監看等工作。目前,可完全實際執行上述任務的生物奈米機器人仍處於概念及實驗室階段,但已有一些研發成果受到世人的重視,如圖五,即為哈佛大學威斯生物工程中心(Wyss Institute)所研發出的DNA奈米機器人,利用 DNA 折紙法(DNA origami method),將長長的DNA鏈像折紙一樣疊起來,形成一個六角型載具,負責運送已先經過編碼的分子到特定的細胞,然後與該細胞表面受體產生作用,進而影響這些細胞。
圖五、DNA奈米機器人,左為前視圖,右為開啟狀態
要製造出理想中的生物奈米機器人,還有一段長路要走。圖六是依照可能的發展模式所規劃出的藍圖,首先要製造出奈米零組件,再將零組件組成奈米機器人,再載入程序及控制,使奈米機器人能分工合作,最後再組成一奈米工廠,讓奈米工廠製造奈米機器人。
圖六、生物奈米機器人的發展藍圖
磁導奈米機器人Magnetically Guided Nanorobots
簡單的說,磁導奈米機器人基本上就只是一個帶有磁性物質的奈米顆粒(nanoparticles),所有構成機器人系統要件的零組件,全部都被移到此類奈米機器人之外。
此類奈米機器人的致動及推進功能,是由外部的磁場(梯度)所控制;偵測及追蹤該奈米機器人的工作則由外部顯影儀器完成,例如電子顯微鏡或磁振造影(magnetic resonance imaging;MRI;亦稱為核磁共振造影)掃描器。
在2003年,加拿大的蒙特婁工學院(École Polytechnique de Montréal)的研究人員將尺寸為10.9微米的磁性顆粒注射到豬的動脈之中,並成功地利用醫療級的MRI去對此磁性顆粒做偵測、追蹤、控制、推進等操作,而此一研究是全世界第一個關於磁導奈米機器人的活體實驗。
磁導奈米機器人的研發正受到各方的矚目,尤其是應用醫學方面的研究。最簡單的構想就是將奈米級的顆粒挖空,然後在此空間中填裝藥劑,再以外部儀器指揮顆粒行進到達指定的部位,然後再讓奈米機器人釋放藥劑以達到醫療的效果。
細菌為基底的奈米機器人Bacterial-Based Nanorobots
以細菌為基底的奈米機器人,其設計原理是來自於細菌在流體中的移動行為模式。此種奈米機器人的製造方式和致動方式,與前述的生物奈米機器(bio-nanorobots)及磁導奈米機器人(bio-nanorobots)相似,但其設計、控制、引導方式仍具有獨特性,所以還是將之歸納成另一種類型的奈米機器人。
一般的細菌,其細胞內有數個直徑約45奈米的分子馬達(molecular motors),細胞體外有數個螺旋形的鞭毛,分子馬達帶動鞭毛,細菌因此獲得推進的動力而能於流體中前進,速度可達25μm/s,此一特性,使得細菌非常適合用來做為奈米機器人的奈米馬達(nanomotors)。
目前,一般細菌前進的方向性仍無法完全被控制,唯其停止及啟動的行為可以用光或化學物質所控制。但有一種細菌,稱為「磁感細菌」(magnetotactic bacteria;MTB),可以提供更廣的操控空間而受到矚目。
MTB細菌體內有一串約20個由磁性晶體所形成的鏈狀構造,每個晶體大小約為35~120奈米,這些磁性晶體的功用特徵就是趨磁性(magnetotaxis),所以該鏈狀構造就像是一個微型羅盤,提供MTB細菌關於地球磁場方向的訊息,讓它們可以據此到達目的地。現今科學家已證實,以外加磁場的方式來操控MTB細菌的行進方向是可行的,而且效果良好。
科學家現在也開始以人工方式模擬細菌的推進行為,目標是創造出完全人工製造的「奈米泳者」(nanoswimmers)。圖七為蘇黎世聯邦理工學院(ETH Zurich)與猶他大學及密西根州大聯合設計的人造細菌鞭毛(artificial bacterial flagella;ABF),其構造為鉻鎳金薄膜堆疊而成的磁性頭部,以及模擬細菌鞭毛的螺旋狀尾部,利用低強度的旋轉磁場就可帶動ABF,若調整磁場的旋轉速度及方向,就可以有效的控制ABF游動的速度與方向。
圖七、人造細菌鞭毛 http://pubs.acs.org/doi/abs/10.1021/nl901869j
由以上的簡介可知,想要做出具有實用性的奈米機器人,還有一段長路要走,直得慶幸的是,奈米機器人的研發已經開始了,而且還有許多令人振奮的進展及突破,未來還是蠻值得期待的。在另一篇文章中,我們將繼續介紹奈米機器人的應用及未來 。
參考資料:
"Nanorobotics Current Approaches and Techniques" edited by Constantinos Mavroidis & AntoineFerreira
"A Logic-Gated Nanorobot for Targeted Transport of Molecular Payloads" by George M. Church et al.
Northeastern University "Bio-Nano-Machines for Space Applications" by Constantinos Mavroidis
http://technews.tw/2013/08/09/film_elysium_and_nanotechnology/ http://www.me.tnu.edu.tw/~me022/lab/21sthope.htm http://highscope.ch.ntu.edu.tw/wordpress/?p=46842 http://nano.nstm.gov.tw/NanoConcept/Inspection/MeasureTool.htm
作者: 謝錦星
現任: 北美智權教育訓練處 研發創新顧問
經歷: 友順科技股份有限公司 技術行銷資深工程師
學歷: 美國紐約州立大學電機工程碩士
專長: 類比IC設計、半導體製程
Facebook 在北美智權報粉絲團上追踪我們
Please enable JavaScript to view the comments.