隨著全球對海上風能投資的不斷增加以及風電技術在深水危險環境中的快速部署,風電機組及其相關基礎設施的在役檢測對風電場的安全高效運行具有重要作用,使得近年來使用無人機對風能基礎設施進行遠程和近程的檢查受到了廣泛關注。
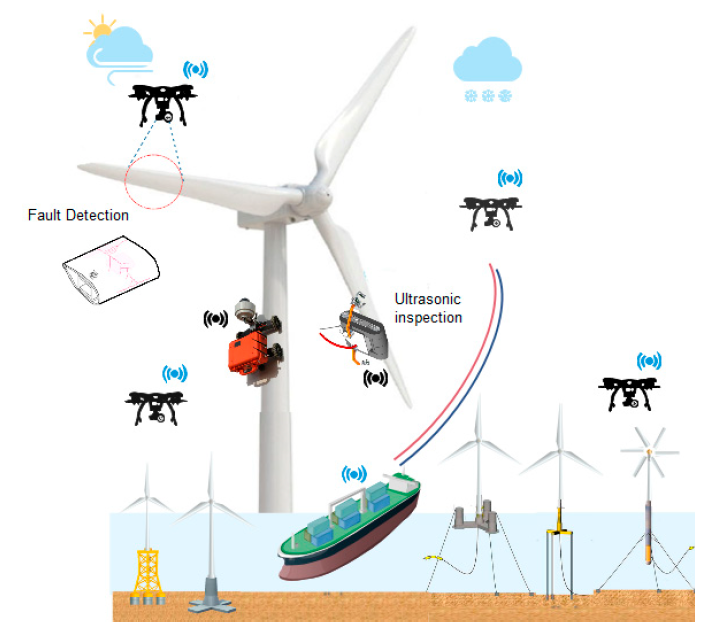
圖1顯示無人機能夠在空中懸停並從不同位置和角度拍攝風力渦輪機部件的高畫質影像[1] ,透過電腦分析這些影像能夠識別風力渦輪機缺陷或損壞的早期跡象,以利採取適當的維護措施和預防故障發生,不僅可以減少人員前往和爬上風力渦輪機的次數,還可以減少執行危險檢查工作所需的重型起重設備的數量,並能縮短檢測缺陷和從整個系統收集診斷訊息所需的停機時間。
除此之外,像是風電行業看不見的製程設施破損死角,以無人機進行陸域和海域之風機葉片的自動巡檢,能夠很好地的代替人工進行檢測,藉此提高設施安全管控及風險辨識的能力。本文就風力發電設備的風機葉片(wind turbine blades)以無人機執行近距離智能巡檢,探討風電行業因此受惠的情況。
圖1:無人機海上風電巡檢示意圖
葉片檢查是離岸風電運維的關鍵項目
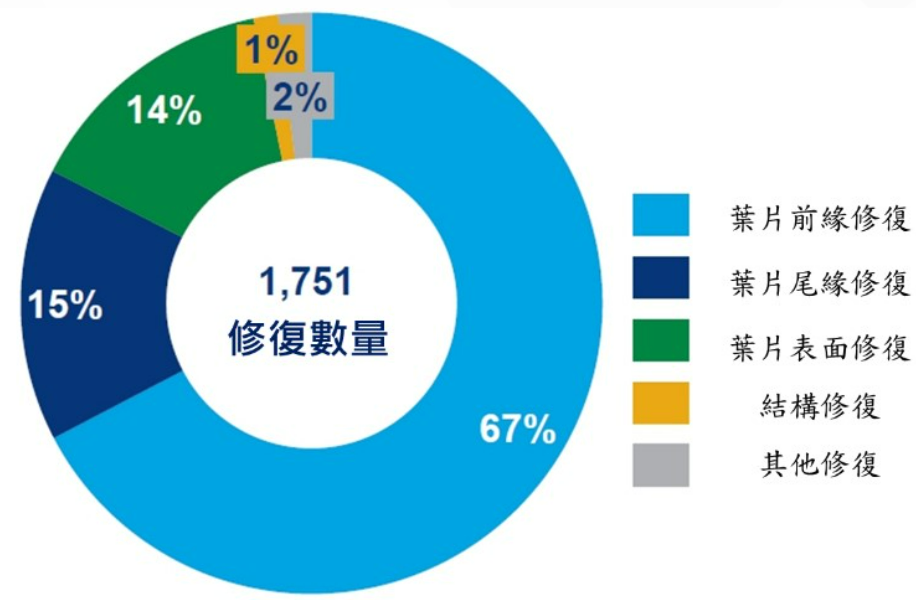
根據2019 Wood Mackenzie離岸風電運轉維護趨勢報告,葉片可用的最佳系統壽命僅約5年左右,葉片侵蝕與修復是離岸風電運維的最大挑戰;光是2018年間葉片修復總數量約1,751支,已造成全球離岸風機累計停機時間超過5,000天,其中又以葉片前緣損壞修復占比67%最高,其次是葉片尾緣修復、葉片表面修復及葉片結構修復,占比分別為15%、14%以及1%(如圖2)。
圖2:離岸風機葉片修復數量占比圖(2018年間)
風力發電機(又稱風力渦輪機,簡稱風機)是一種將氣流的動能轉為機械能的裝置,通常會接上發電機並透過風力帶動葉片(大多採用3葉片驅動)旋轉,促使發電機發電。因此,葉片是風力發電機組中一個非常關鍵的部件,它的氣動效率決定了風力發電機組利用風能的能力。葉片不僅要有最佳的機械性能和疲勞強度,還要具有耐腐蝕、紫外線照射和防雷擊等性能。葉片高速轉動時不可避免會與空氣中的沙塵、顆粒產生摩擦和撞擊,導致葉片前緣磨碎或開裂。另外,隨著風機運行年限的增加,葉片表面膠衣(gel coat)磨損、脫落後會出現砂眼和裂紋,砂眼會造成葉片阻力增加影響發電量。
以往,在檢查風力發電設備的風機葉片(wind turbine blades)有無損傷時,通常是在葉片旋轉停止的狀態下,使用懸掛繩索或吊籃工人移動到葉片所在位置進行目視檢查和錘擊檢查,或者採用望遠鏡、地面高倍率相機等人工方式進行風機葉片巡檢,耗費大量勞力和時間。若能透過無人機進行自動巡檢代替人工檢測,時效必定提高。近來已有使用無人機檢查風力發電設備,但多涉及風力發電設備緊急停止狀態下,對靜止或輕微旋轉之葉片的各個部分進行拍攝,以獲得檢查圖像[2] 。綠能科技中之風力發電機(風機)已有無人機智慧巡檢這方面的實務應用並申請專利。
導入AI實現風機葉片智能巡檢
為使能在葉片正常運轉狀態下進行損傷檢查作業,韓國專利號KR102142540B1揭示一種基於機器學習和無人機的風力渦輪機複合材料葉片損傷的檢測方法[3] ,該方法透過對每個損傷模型進行模態分析,獲取並存儲每種損傷的固有頻率數據;生成多個訓練數據,其中定義了固有頻率數據和損傷類型之間的相關性,然後使用每個訓練數據機器學習神經網絡;透過配備有雷射或位移測量裝置的無人機利用圖像獲取正在運行之葉片的振動數據;並將振動數據轉化為頻率數據輸入神經網絡,透過神經網絡獲取並輸出損傷類型的檢測訊息。該檢測方法能夠透過無人機檢測葉片的當前狀態,反映實際的結構特徵和各種損傷類型,不僅能在葉片運轉的同時進行損傷檢查作業,顯著提高損傷試驗作業的客觀性和可靠性,也透過基於神經網絡學習和測試每種損傷類型的固有頻率,進行更快速和準確的損傷測試操作。
結合電腦視覺和光達技術 力上加力
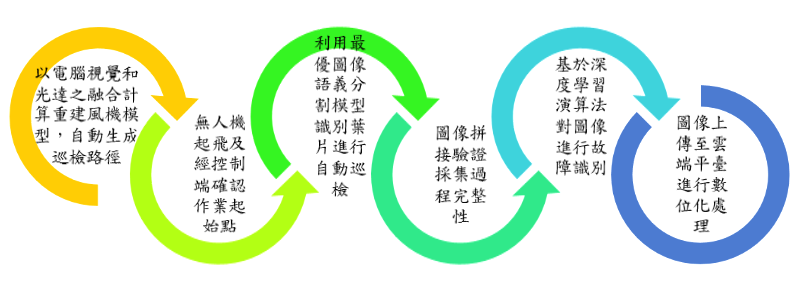
例如在中國有業者發明一種全自動風力發電機組葉片智慧巡視及診斷分析方法[4] ,該方法包括:無人機利用電腦視覺和光達(Lidar,英文全名為Light Detection And Ranging)之融合計算重建風機模型,並自動生成巡檢路徑;無人機起飛經控制端確認作業起始點並沿巡檢路徑飛行,利用最優圖像語義分割模型識別葉片進行自動巡檢;無人機根據巡檢路徑依次巡檢風機三個葉片完整採集全部葉片的圖像;無人機將採集的同一條路徑下葉片前景圖像進行拼接驗證其採集的完整性;基於深度學習演算法對圖像進行故障識別,並對故障圖像進行類別和嚴重程度的評定,圖像上傳至雲端平台,進行分類存儲,對圖像進行數位化處理。這種結合電腦視覺、深度學習和圖像語義分割等技術,實現無人機對葉片全自動巡檢和故障診斷的方法流程如圖3所示。
圖3:無人機對葉片全自動巡檢流程
導入RTK高精度定位、僅釐米級定位誤差(近距離巡檢)
無人機應用於風機故障巡檢已成為一大熱點,為避免無人機巡檢時撞上葉片的風險,近距離巡檢對於定位精度的要求頗高,為滿足高精準定位需求的應用,近來已有業者將RTK(Real- time kinematic)高精度定位技術導入無人機風機葉片自主避障巡檢的方法[5] ,所採用的定位是RTK定位技術。RTK是Real- time kinematic的縮寫,稱為實時動態技術[6] ,用於校正當前全球導航衛星系統(Global Navigation Satellite System, GNSS[7] )中的定位誤差並將誤差縮減到釐米級[8] 。以GNSS系統中美國的GPS(全球定位系統Global Positioning System,簡稱GPS)為例,RTK就是一種GPS校正技術,可在無人機從現場測量和捕獲圖像時對位置數據進行即時校正。與現有的GPS定位相比,定位精度能達到釐米等級,也就是當無人機貼近葉片表面巡檢時可達到釐米級別的精度,非常適用於無人機近距離巡檢風機葉片表面使其拍攝到的照片更加清晰,同時搭載避障模組,不依賴飛手的操控技術即可有效的躲避障礙物,在飛行環境中更安全、高效的執行巡檢任務。
蝙蝠存活率受惠於無人機新技術
最近有一項研究解決風力渦輪機對空中生物(尤其是蝙蝠)造成傷害的問題。根據特拉維夫大學(Tel Aviv University) 和海法大學(Haifa University)的研究人員的說法,世界各地的風力渦輪機每年殺死數百萬隻飛入葉片的蝙蝠和其他飛行鳥類或動物。解決方案是一種保護蝙蝠免受風力渦輪機傷害的無人機安裝技術,利用可傳輸超聲波信號和光的組合阻止了蝙蝠,迫使它們在更高的高度飛行,讓渦輪機繼續運行。當然,風力渦輪機是可再生能源的極好來源,但它們的運行方法留下了無數的生物學挑戰。以前,阻止蝙蝠死亡的唯一方法是在渦輪機活動時停止渦輪機活動,這顯然會降低渦輪機的效率。無人機處於不斷運動狀態,並傳輸視覺和聽覺信號的組合,旨在警告蝙蝠危險。訣竅在於,當信號是靜止和恆定的時,動物往往會忽略它們。這項研究是在以色列山谷的蝙蝠溫床上進行的。該團隊在100米的高度操作無人機,這是平均風力渦輪機中心的高度,並沿著約1米的路徑來回操作。雷達和LiDAR設備用於跟蹤蝙蝠的活動,並且使用放置在三個不同高度的接收器偵測飛行中蝙蝠的聲學記錄。這項研究是世界上第一個將雷達、光達和高空聲學記錄儀等技術結合起來跟蹤蝙蝠的研究。然後,研究人員將蝙蝠的正常活動與它們在無人機存在下的活動進行了比較,結果表明該設備達到了其目的:無人機的存在使蝙蝠在大約40米的距離內將蝙蝠的活動減少了約25%。它們的活動幾乎都集中到無人機100米以上的高度,甚至高達800米。結果表明該裝置可以有效地將蝙蝠從環境中驅趕出去,這些生物可以感知無人機裝置上所發射的聲音或光且會想辦法避開,蝙蝠的存活率肯定會從這項新技術中受益。[9]
Mahmood Shafiee, Zeyu Zhou, Luyao Mei, Fateme Dinmohammadi, Jackson Karama and David Flynn. Unmanned Aerial Drones for Inspection of Offshore Wind Turbines: A Mission-Critical Failure Analysis. Robotics. 2021. Page 3. https://doi.org/10.3390/robotics10010026
JP2017-020410A(特開2017-020410),風力発電設備のメンテナンス方法および無人飛行機,NTN株式会社。專利公開日2017年1月26日;JP2022-108420A(特開2022-108420),風力発電設備の点検方法,関西電力株式会社,專利公開日2022年7月26日。
KR102142540B1, inspection method for damage of composite blades for wind turbine using machine learning and drone, Industry-Academic Cooperation Foundation Kunsan National University, patent issued on 2020 August 3.
CN112360699A,一種全自動風力發電機組葉片智慧巡視及診斷分析方法,華能大理風力發電有限公司,專利公開日2021年2月12日。
CN113359815A,基於RTK定位的風機葉片無人機自主避障巡檢方法及系統,上海電機學院,專利公開日2021年9月7日。
實時動態定位技術(Real Time Kinematic,簡稱RTK)是實時動態載波相位差分技術的簡稱,是一種透過基準站和流動站的同步觀測,利用載波相位觀測值實現快速高精度定位功能的差分測量技術。RTK系統由1個基準站、若干個流動站及無線電通訊系統組成。RTK技術的關鍵在於使用了GPS的載波相位觀測量,並利用了參考站和移動站之間觀測誤差的空間相關性,透過差分的方式除去移動站觀測資料中的大部分誤差,提供高達厘米級的精度。實時動態技術 - 維基百科,自由的百科全書 (wikipedia.org)
GNSS的全稱是全球導航衛星系統(Global Navigation Satellite System),它是泛指所有的衛星導航系統,包括全球的、區域的和增強的,如美國的GPS、俄羅斯的Glonass、歐洲的Galileo、中國的北斗衛星導航系統,以及相關的增強系統,如美國的WAAS(廣域增強系統)、歐洲的EGNOS(歐洲靜地導航重疊系統)和日本的MSAS(多功能運輸衛星增強系統)等,還涵蓋在建和以後要建設的其他衛星導航系統。國際GNSS系統是個多系統、多層面、多模式的複雜組合系統。
https://en.wikipedia.org/wiki/Real-time_kinematic_positioning#cite_note-Wanninger2008-1
https://www.techbriefs.com/component/content/article/tb/stories/blog/47383
【本文僅反映專家作者意見,不代表本報及其任職單位之立場。】
作者: 芮嘉瑋
現任: 中技社科技暨工程研究中心組長
學歷: 國立清華大學 奈米工程與微系統研究所 博士
經歷: 工研院技術移轉與法律中心執行長室
專長: 長期從事產業研究、專利智財與投資評估等工作,專注於能源、產業、環境、經濟等議題。擅長創新技術策略分析、科技預測及評估、專利分析與布局、產業分析、智慧財產權管理與經營策略、專利的商業化與貨幣化。熟捻產業技術發展趨勢,並常在各媒體平台發表文章、應邀演講,成功引領技術前瞻與產業關鍵議題。
Facebook 在北美智權報粉絲團上追踪我們
Please enable JavaScript to view the comments.