機械手臂在工業自動化中是極為重要的設備,我們在此要介紹一種水平多軸機械手臂,又稱為SCARA (Selective Compliance Articulated Robot Arm),圖一所顯示的是一個水平三軸機械手臂。
圖一、水平三軸機械手臂
在圖一的機械手臂中有三個可以水平轉動的關節,分別是A、B和C。這三個關節能夠轉動,主要是因為有馬達的緣故。在機械手臂及許多工具機或工業自動化設備當中,馬達都是一個非常重要的零組件,還有另外兩個重要的零組件,分別是減速機和控制器,請看圖二。
圖二、三大關鍵零組件
控制器包含了硬體和軟體,軟體就是程式碼,工程師要設計程式碼來命令控制器工作。控制器的任務,是要產生電子訊號給馬達,這個電子訊號可以命令馬達轉動或者停止,轉動又有分為順時針轉和逆時針轉,也有不同的轉速,這些都可以由工程師寫的程式碼來決定。
馬達的轉速可以很高,但旋轉的扭力是小的,沒有辦法推動很大的負載,這時我們要使用減速機。減速機內部有很多齒輪,可以將轉速降低,把扭力加大,如此一來就可以推動比較大的負載。
以上這些關鍵零組件,在機械手臂中非常重要,但還不夠,工程師還需要了解運動學演算法,請看圖三。
圖三、水平三軸機械手臂和運動學演算法
比方說,我們要機械手臂移動到某一個位置,這中間可能要做直線運動或者圓弧運動,手臂如何能夠移動?答案是要靠關節的轉動,我們只能命令馬達轉動,馬達轉動帶動關節轉動,只要三個關節都有適當的角度,機械手臂就可以移動到我們所要的位置。因此我們知道,想要讓機械手臂做出我們要的動作,就需要知道每一個關節對應的角度。
運動學是一套數學理論,它可以根據我們想要的機械手臂姿態,去計算出所有關節正確的角度。工程師把這套數學理論寫成程式碼,在軟體中實現運動學的數學計算,如此一來就可以快速的計算出關節的角度,並且命令馬達轉動到適當的位置。
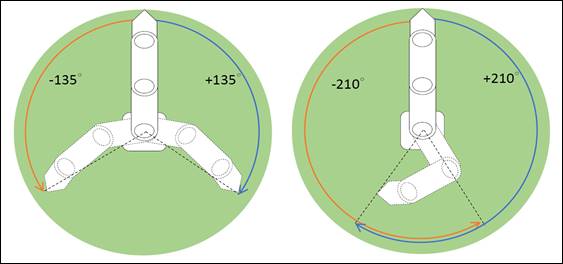
我們當然希望機械手臂的活動範圍是大的,一般的水平三軸機械手臂受限於手臂內部線材扭繞曲要求,機械手臂活動範圍大約是270度。為了提高機械手臂的活動範圍,我國的工程師自行開發了一套運動學演算法軟體,這套軟體中具備機械手臂的數位孿生(Digital Twin),能夠對機械手臂的虛擬與實體進行監測與回饋,這項技術使得機械手臂的活動範圍增加到420度(一般正常使用處於360度範圍)。
圖四、三軸機械手臂活動範圍示意圖
除了機械手臂的活動範圍較大外,這家公司的機械手臂載重量也較高。一般的水平三軸機械手臂載重量大約3~5公斤,但他們的機械手臂載重是20公斤,這牽涉到機械手臂的機構設計,工程師必須注意結構強度、耐久性、振動抑制和升溫等問題。
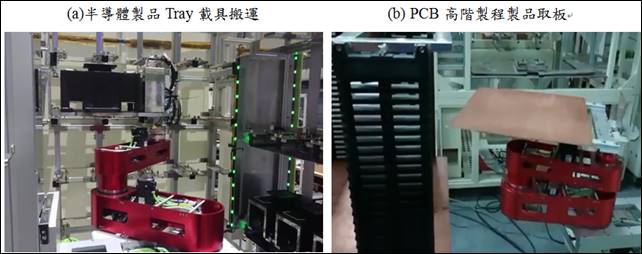
我們國家已經有能力自行設計與製造這種水平三軸機械手臂,並且將它應用於晶圓倉儲自動化搬運系統,目前我們已經有能力輸出整廠設備。由於有自行開發的運動學演算法軟體,這家公司的機械手臂和軟體是互相搭配的,軟體價值是一億台幣,如圖五所示。
圖五、三軸機械手產業整合應用情境
值得我們注意的是,目前全世界有70%的減速機都是日本製的,而且價值是極高的。假如我們使用普通的減速機,它可能在運作幾個小時以後升溫到攝氏70度,這是會有問題的。而高級的減速機即使長時間運作,溫度都保持在攝氏40度。這一點顯示了精密工業的重要性,想要有高級的產品,就絕對不能不注意各種工業用的關鍵零組件。
我們已經有整廠輸出的公司,也可以賣掉價值1億元台幣的軟體,實在不是一件容易的事,非常值得大家高興的。
※ 本文獲《為台灣加油打氣專欄》授權轉載
【本文僅反映專家作者意見,不代表本報立場。】
| 作者: |
李家同 |
| 現任: |
清華大學、靜宜大學、暨南大學、台北商業大學榮譽教授
博幼社會福利基金會董事長 |
| 相關連結: |
為台灣加油打氣專欄
李家同臉書
博幼社會福利基金會臉書
博幼社會福利基金會捐款劃撥帳號:22482053
(300)新竹市光復路清華大學資訊工程系 |
|
|
|
| Facebook |
|
在北美智權報粉絲團上追踪我們 |
     |
|
|
|
|
|
|
|


